Solucionando erros
Essa página tem o intuito de mostrar as soluções encontradas para lidar com erros que ocorrem naturalmente com o uso do Tello com scripts em Python, ou fora do aplicativo.
Auto-landing
Um dos problemas comuns que ocorriam era o Tello pousar inesperadamente, sem motivos aparentes. Isso pode acontecer por algumas razões:
Pouca bateria: O Tello começa a piscar vermelho (como descrito na tabela do manual) e pousa. Vale a pena sempre mandar printar a bateria para monitorar isso.
self.battery = self.tello.get_battery()
print(self.battery)Muito tempo sem comandos: Quando o drone não recebe um comando dentro de um determinado período de tempo, ele pousa por motivos de segurança (por exemplo, quando seu programa caiu ou a conexão foi interrompida). Nesse caso, o Tello pousa geralmente depois de 15 segundos sem receber comandos, piscando vermelho tamb ́em (mas ”solid”). Cuidado, portanto, se o seu código tem time.sleep muito longo. Isso pode fazer o Tello pousar ou perder conexão. A própria biblioteca DJITelloPy tem seus próprios time.sleep embutidos, apesar de parecerem, ás vezes, insuficientes mesmo. A solução encontrada para isso foi mandar um sinal de "command" para o drone a cada 10 segundos (em segmentos do código que dependem de input no computador e, por isso podem demorar, ou em loops que de- pendem da detecão da mão para mandar comandos). Isso parece que resolveu o problema do Tello pousar automaticamente e não prejudica a segurança, pois, se de fato perdermos a conexão com o Tello, ele irá pousar automaticamente após 15 segundos. Veja abaixo a função:
def keep_tello_alive(self):
#Manda sinal para o tello não pousar. Criamos uma função, pois chamaremos em outra classe
if not SIMULATION:
self.tello.send_control_command("command")
- Falta de tempo de espera: O contrário também pode acontecer. uando o Tello recebe comando sem ter terminado o último, ás vezes pode dar erro e ele acabar pousando. Isso ocorre principalmente logo após takeoff. Mensagens de erro que ocorrem quando falta delay são: error Not joystick ou Exception: Command 'xxxx' was unsuccessful for 4 tries., por exemplo. Nessa situação, o Tello também pisca vermelho e pousa. Tente colocar algum time.sleep e veja se melhora. Ou, ainda, espere um pouco antes de rodar o programa logo após conectar com o Tello.
Flip errors
Outro erro comum ao rodar script de python com o Tello é que ele não analisava o nível de bateria antes de mandar um comando de 'flip'. O problema é que abaixo de 50% de bateria, o drone não dá flips. Ao receber um comando de 'flip' sem ter bateria suficiente, o drone retorna flip error e isso pode causar erros maiores no código como Exception: Command 'xxxx' was unsuccessful for 4 tries. que pode levar ao pouso automático. Logo, foi incluído no código uma função que sempre verifica o nível de bateria e retorna se é possível dar 'flip' ou não (tudo armazenado na variável self.tricks do tipo bool):
def get_tello_battery(self):
if not SIMULATION:
self.battery = self.tello.get_battery()
else:
self.battery = BATTERY
if self.battery <= 50:
self.tricks = False
else:
self.tricks = True
Out of range
Além de erros de manobras com 'flip', cuidado ao mandar o Tello se movimentar para lugares impossíveis, por exemplo, ir para baixo 2 metros, sendo que ele está voando a um metro do chão. Ou ainda, mandar ele se movimentar em alguma direção abaixo de 20 cm (o mínimo é 20 cm). Quando mandamos algum desses comandos descritos, pode dar o seguinte erro:

Para evitar esse erro, verifique sempre se a movimentação é possível dentro das limitações do Tello. Por exemplo, em parte do código, verificamos se a altura a descer é possível dada a altura atual do drone:
if getHeight - distance > minHeight:
print("Descendo", distance, "cm")
Rotation error
Também foi enfrentado já um erro de rotação. Quando pedíamos para o Tello rotacionar "x" graus no script e "x" era um número inteiro não múltiplo de 10, como 82, 271, etc, o Tello mandava um erro:
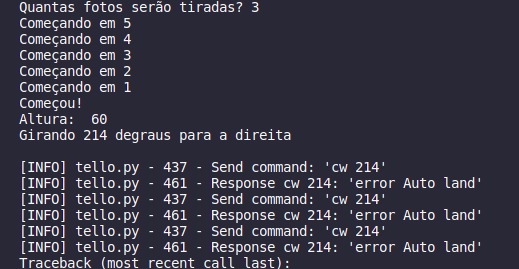
A solução encontrada foi definir que o Tello só poderia rotacionar em múltiplos de 10 e menores que 100. Veja um exemplo:
deg_choices = [30, 40, 50, 60]
...
degrees = deg_choices[random.randint(0, 3)]
print("Girando", degrees, "° para a esquerda")
if not SIMULATION:
self.tello.rotate_counter_clockwise(degrees)